It was never so easy to get YouTube subscribers

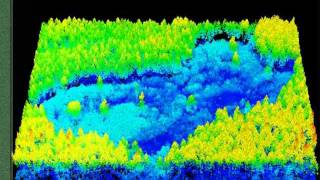
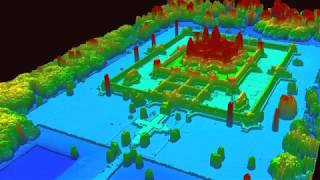
Basics of Airborne LiDAR (C16 V1)
What is LiDAR?
How is range determined?
What does intensity mean?
First returns vs. last returns
Digital surface model vs. digital terrain model
Point cloud data structure
Convert point cloud to raster by inverse distance weighting


















Recommended







