DIY Arduino Nano Based Self Balancing Robot using balancewii | Arduino Projects

Hello guys,
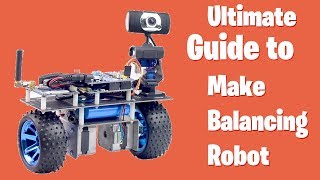
Take a look at this selfbalancing robot which we tried to make using Original Arduino Nano, stepper motors and a4998 motor driver shield. The hardware part was an easy build as we had a lot of references..the major problem we had was with the balancewii software and then understanding the ezgui interface.
The bot consists of position hold, simple mode, and joystick control mode. the app interface was easy to use but we were ignorant of some settings and were lost for 2 straight days.
The structure was made using acrylic and mpu6050 is used for measuring orientation and hc05 for sending commands..
Hope you liked this one.if you did..make sure to like, share and subscribe.stay safe.stay tuned at robu.in
Components used in this project:
1. Original Arduino Nano https://robu.in/product/originalardu...
2. Stepper motors Nema 17 https://robu.in/product/nema1742kg...
3. MPU6050 module https://robu.in/product/mpu6050gyro...
4. HC05 Bluetooth module https://robu.in/product/hc056pinbl...
5. A4988 motor drivers https://robu.in/product/a4988driver...
6. 11.1V Lipo battery https://robu.in/product/orange111v...
7. 100uF capacitor https://robu.in/product/100uf50v20...
Mechanical components used:
1. Stepper Brackets https://robu.in/product/easymechbrac...
2. Acrylic 3mm https://robu.in/product/onlinelaser...
3. Robot wheels https://robu.in/product/robotwheel3...
__________________________________________________________
Visit www.robu.in
Blog https://robu.in/diyselfbalancingro...
Follow Us –
Instagram / robu.in_
Facebook / robulabs
Twitter / robulabs
#selfbalancing #selfbalancingscooter #arduinoproject #arduinoprojects #diy #arduino #balance #arduinoprogramming
Arduino ProjectSelf Balancing Robot
DIY self balancing robot arduino based
How to make self balancing robot