Buy real YouTube subscribers. Best price and warranty.

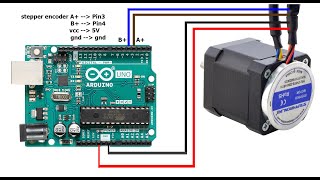
How to run Arctos robotic arm in closed loop - wiring the encoder
In this tutorial we will setup and run Nema 17 stepper motor in a closed loop control by CAN Bus protocol.
Source code: coming soon
pythoncan: https://pythoncan.readthedocs.io/en/...
Download CAD files: https://arctosrobotics.com/
Join discord: / discord
Tracks:
Skeler One day










![Simple Inverse Kinematics and iPhone control [for any DIY Robotic Arm]](https://i.ytimg.com/vi/RTJcFyFXNE4/mqdefault.jpg)








Recommended







