Inverse Kinematics of Robots | Robotics 101

What is Inverse Kinematics and how do we use Inverse Kinematics to make the robot move from point A to point B?
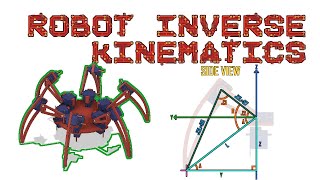
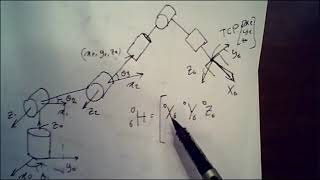
IK is one of the most interesting and most widely used concepts in the world of robotics. Very briefly, it is calculating the robot parameters (link lengths & joint angles) in order to make the robot go to a specified location with a specific orientation.
It is exactly the opposite of forward kinematics and is therefore sometimes called backward kinematics as well. The best part about it is, that doing inverse kinematics is quite easy, especially if you have a good grip on forward kinematics.
00:00 What is Inverse Kinematics?
01:27 Example of Inverse Kinematics using 3DOF robot
01:56 3DOF moving robot application
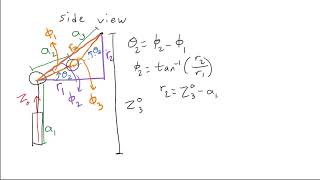
03:33 Solving Inverse Kinematics
06:35 Cool trick to solve sin & cos linear equations
08:54 Solutions of Inverse Kinematics
▼▼▼
You can download the 3DOF robot app that I coded on MATLAB where the robot's position can be changed by rotating the joint angles here:
https://www.zainullah.com/programming...
⏩ Watch the next video where we do an even more interesting example of Inverse Kinematics :
If you haven't watched the video on forward kinematics, I would highly encourage you to check that out first: • Forward Kinematics of robots | Planar...
This video is part of the Robotics 101 tutorial series which covers kinematics and modeling of 2D & 3D robots.
This tutorial lesson series starts from the basics of robotics (assuming no prior knowledge) and gradually builds on in bitesized videos of 10 minutes or less. By following along, you will soon become extremely good in the kinematics and modeling aspects of robots. And these will help you to design and build robots.
Here's what we will cover in this video series:
1. Coordinate Transformation for 2D & 3D robots
2. Homogeneous Transformations for 2D & 3D robots
3. Forward Kinematics
4. Inverse Kinematics
5. Robotic wrists (endeffector)
6. Endeffector Velocities and Jacobians
7. Singularities of robots
8. Gimbal Locks
9. Forces & Torques
I will be uploading 1 video per week. If you find these helpful, don't forget to share and subscribe!
_____________________________
Link to the Robotics 101 playlist
• Robotics 101
Robotics 101 Robotics full course for beginners Kinematics and Modeling
#inversekinematics#roboticsforbeginners #roboticsTutorials #robotics #learnrobotics