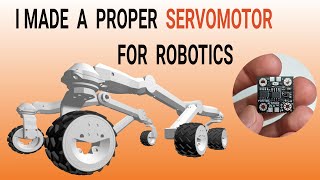
Nema 17 wireless robot actuator | Massive torque | Position feedback | No backlash

Wiremanagement sucks for any robotics project. So in this video, I build a wireless robot actuator (robot joint) based on a Nema 17 and Nema 23 stepper motor. The robot actuator has massive torque, no backlash and it provides full position feedback. I can control the actuator via a webpage on a computer or a phone. I put the actuator to test to see how much backlash and torque it has.
The list of offtheshelf components, the CAD files and the grbr files for the pcb are in the following github repository:
https://github.com/curiositycreates/...
In my future videos, I plan to connect multiple of these actuators to create a robotic arm. I want to try a few techniques to make sure the communication between these is seamless and without lag when a bunch of them are used together. If you liked the content in this video and would like to see how I create a robotic arm with these actuator, please subscribe to the channel. It will help me a lot as i am just starting my journey on youtube.
Link to WhiteOwls video: • Detailed Assembly Guide for a Very Co...
Link to Emilostuff video: • 3D Printed NEMA 17 Precision Gearbox ...