PID controller for a line following Robot by using Simulink in MATLAB

This project demonstrates a practical PID controller for a line
following robot. The project was done using Simulink in MATLAB simulation
software. A library called Mobile Robotics Training Toolbox was used to
simulate the robot in realtime. The mission of the robot is to complete the trail
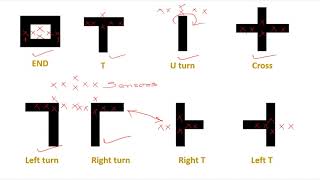
by using only the PID control algorithm. The trail consists of rounded and 90 bends.
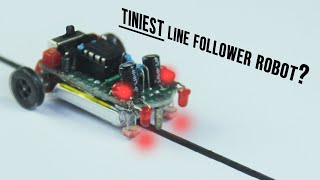
The robot uses IR sensors to detect the line. There are six IR sensors located in front
of the robot. These six IR sensors' arrays calculate the error of the system. The
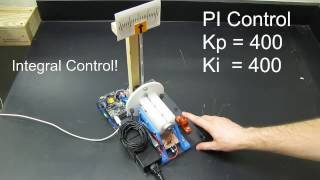
error here is, how much the robot deflects from the line. This error fed into the PID
controller. According to the given P, D, I values the system outputs, how much
does the robot need to turn in order to stay on the line. All the dimensions that are used
in the simulation are practical values. So that, this controller can be directly implemented on a realworld robot with the same dimensions.





![Enhanced Self Balancing Robot Simulation in Simulink [ PID ]](https://i.ytimg.com/vi/fdy86fPQiXY/mqdefault.jpg)