Secret weapon how to promote your YouTube channel

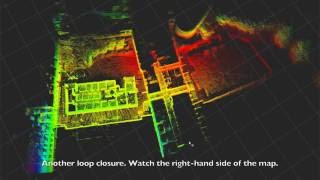
Real-time 3D Lidar with Inertial and Lidar Odometry

Sensor fusion with inertial and LIDAR data to estimate the position and velocities in real time. The current 3D point cloud is compared to the previous one to reduce errors caused by the integration of noisy and uncertain inertial measurements. The visualization shows two adjacent 3D point clouds on top of each other as the device, attached to an allterrain vehicle, is driven around a parking lot and a young forest. The color of point cloud is determined by its height. Higher points are colored more lighter and greener as lower points are brownish. The visualization uses open source Point Cloud Library (http://pointclouds.org/) to present 3D data. The work is done by Heikki Hyyti, Aalto University.



















Recommended







