self balancing robot | Simulink basics series

in this practical tutorial you will learn how to build and control a selfbalancing robot in Simulink.
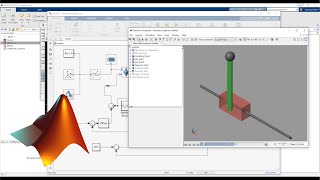
in this first video from the Simulink basics series we will build and control a 3d model of a twowheeled selfbalancing robot.
we used a PID controller to achieve an upright pose for the robot and used two approaches for tuning the PID controller which are: manual and autotuning.
IMPORTANT :
1. the value of the gain block is : 180 / 3.14
links :
1. Get the project files from : https://kofi.com/s/716bba8384
⏱Timestamps:
0:00 intro
0:56 what is a selfbalancing robot?
1:56 making the wheels
5:00 making the upper body
9:23 the wheel's shaft and some rotations
11:32 working with joints
12:45 building the control system
15:17 tuning the PID controller
17:48 outro
Hashtags:
#simulink #SelfBalancingRobot #matlab












![Enhanced Self Balancing Robot Simulation in Simulink [ PID ]](https://i.ytimg.com/vi/fdy86fPQiXY/mqdefault.jpg)