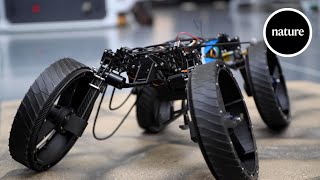
SK8O 'Skateo' – two-legged wheeled balancing robot

First prototype of a twoleg/wheel balancing robot. Designed and developed by students (Krištof Pučejdl, Martin Gurtner and Adam Kollarčík) within a 3month project. The latter worked on the topic within his graduate diploma thesis (available for download at https://support.dce.felk.cvut.cz/medi....
Inspiration for the whole project and in particular the mechanical configuration was taken from a student project Ascento https://www.ascento.ethz.ch/ developed at ETH Zurich but actual technical solutions for mechanics, electronics, algorithms and programming are our own.
With a new version we plan to make the whole project opensource – designs for both mechanics and electronics and source codes for software will be shared through some public repository).