Get real, active and permanent YouTube subscribers

Stepper motor robot arm controlled with grbl and bcnc

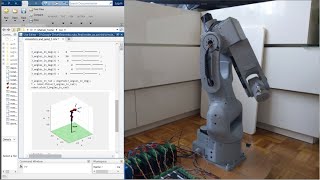
Motors are nema 23 size. Gearboxes are planetary, ratio 1:50. Both are second hand stuff. There is no special code. Just ordinary Grbl 1.1 in arduino uno. It is controlled by BCNC. Gcode is generated firstly by driving robot arm manually to wanted spots. Then locations is saved and driven as a gcode
You can download dxffile about parts by clicking the link. (Link repaired 03.01.2021)
https://www.dropbox.com/s/5s3r5f3uzxl...
(Link repaired 03.01.2021)
Here is a small video, where you can see the robot arm from different angles
• Stepper motor robot arm overview


















Recommended







